LAST SUPPER
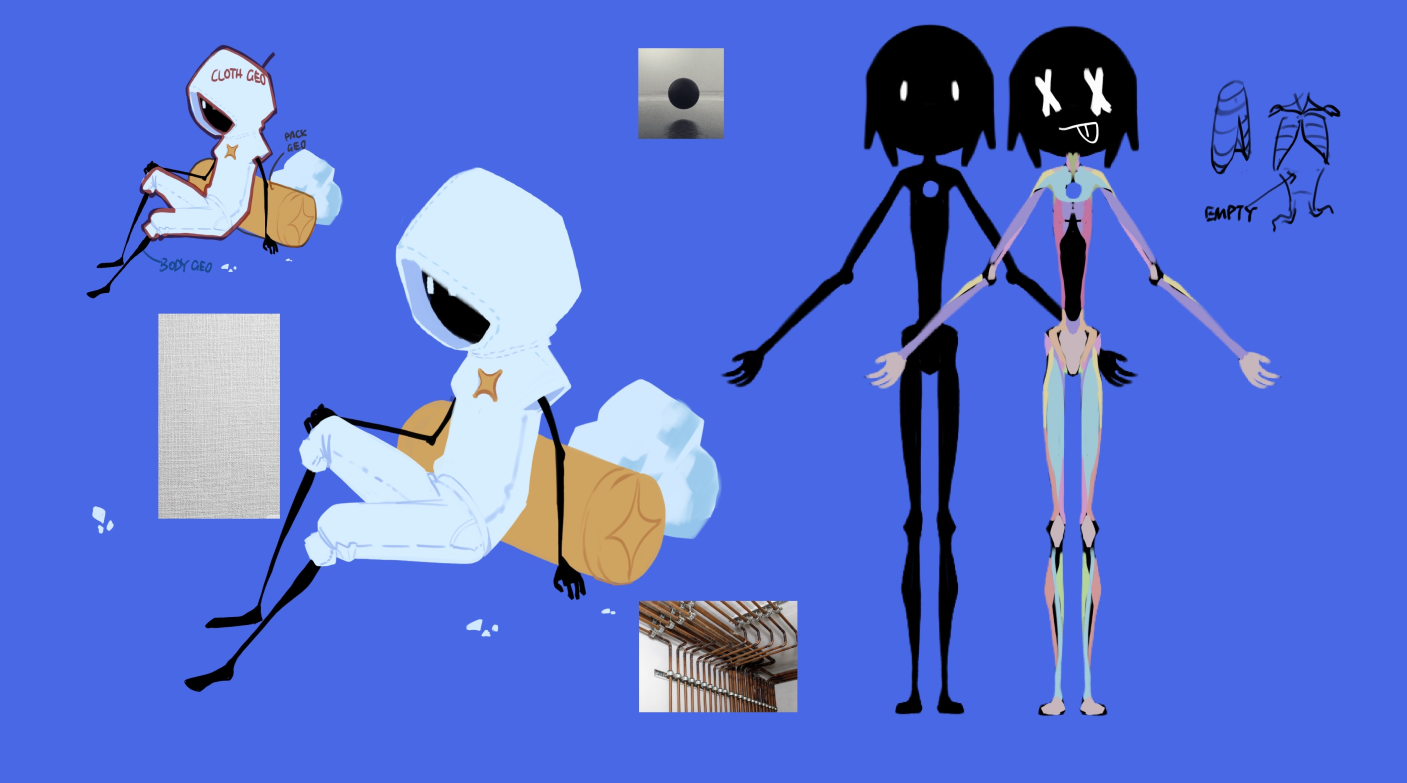
My bumper project “Last Supper” is about a stranded robot living his daily routine while his master has passed away ages ago.
The most challenging part of this project is the rigging of the main character —the robot.


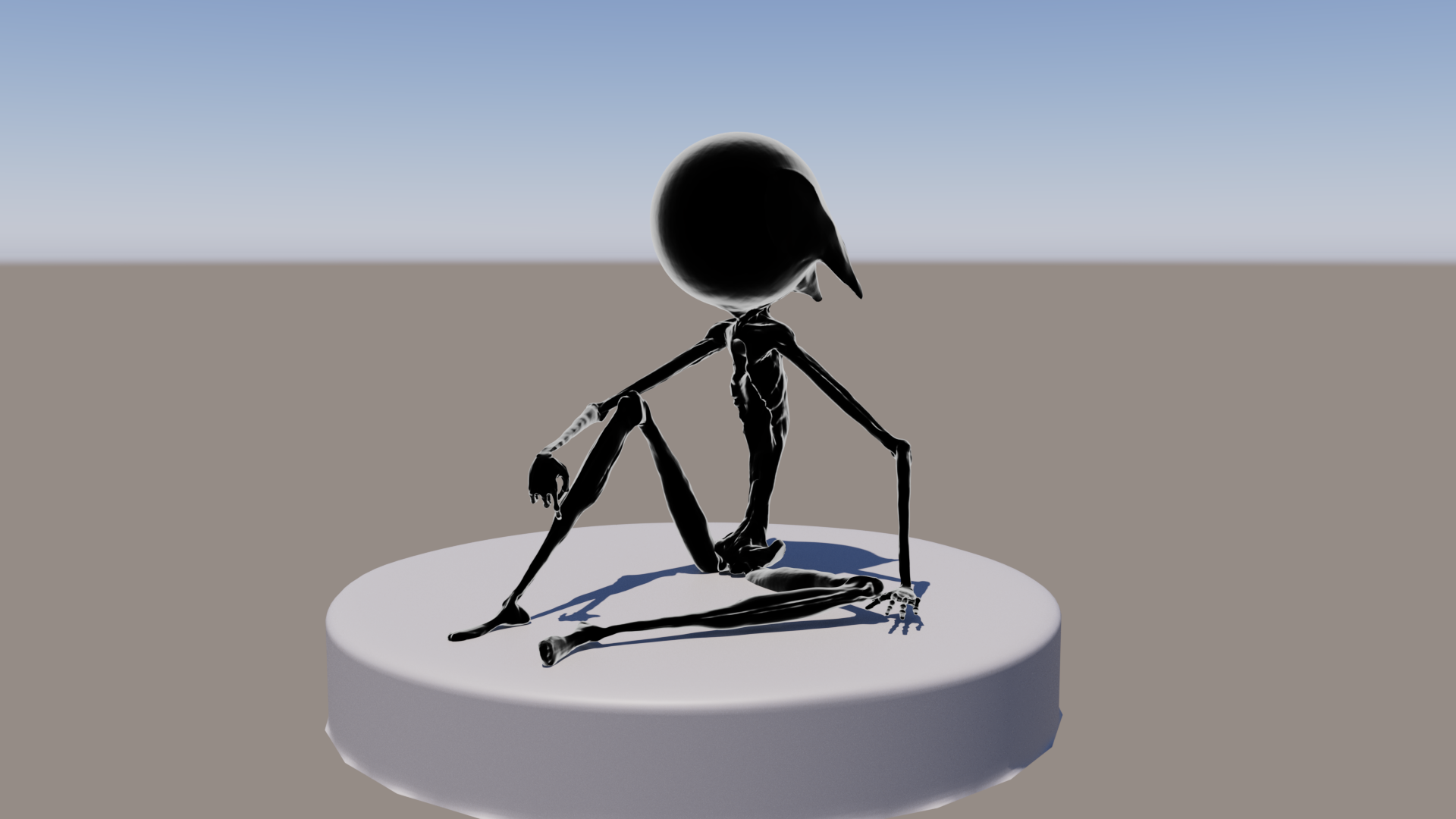
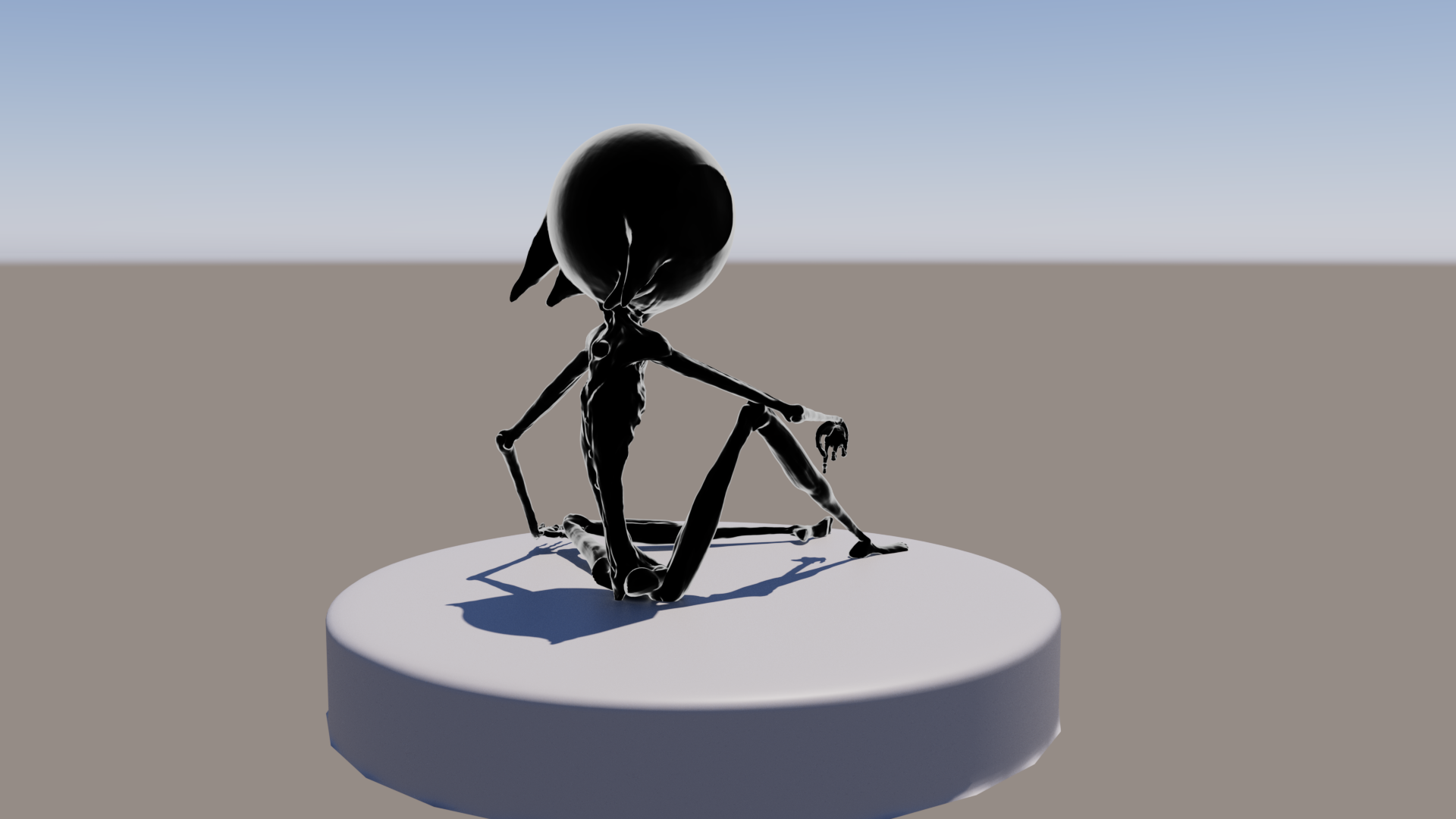
The Robot
This is the rigging showcase video of my robot character.
It does not need skining because all of its geometry do not need to deform.
The shoulder problem
Conventionally, you would use a simple IK for arm rigging. However due to the design of this robot, its shoulder is not made of a ball joint. I need another work around. By connecting the rotation x y z on a single joint to 3 different shoulder part’s corresponding rotation x y z, and parenting them in a correct sequence, a 3 joint shoulder system that works exactly like a ball joint is done.
Reverse Mermaid
Though the reverse mermaid only appeared at the very bottom of the Jam film, the rigging of the reverse mermaid is fully functional. This is the showcase video.



Maya lighting + Nuke compositing
